
( Y% Q. Y7 V, u3 E2 W. Q8 d6 E, X( n+ j6 J' b- P) U9 }
倒爬机器人
! R* |5 {/ {5 m+ Z$ ^公仔箱論壇
' z0 @* d! ?5 `3 b* y2 ttvb now,tvbnow,bttvb
6 v* `- c( \1 f# T$ E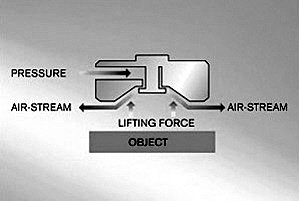 tvb now,tvbnow,bttvb9 ~& i4 _* x9 W; `( m/ { tvb now,tvbnow,bttvb9 ~& i4 _* x9 W; `( m/ {
% E& ?$ K9 A% S4 m; @2 M" t- ?" v9 S# kwww.tvboxnow.com机器人倒爬原理示意图 能在墙上行走的机器人,大家听过不少,它们大多模拟自然界一些天然的粘结机制,比如有些机器人就模拟类似壁虎脚的干性粘合,固定在墙面,支持身体的移动。
{9 p1 C* c7 y! ]www.tvboxnow.com 不过我们看到的图中这个小机器人,却运用了另一种思路。它采用一个流体动力学的著名原理(还是其“超音速版”),让自己潇洒地固定在几乎任何表面,它甚至不需要接触到表面,工作原理与壁虎脚完全不同。
( h6 j9 E( l T 它借用的是伯努利原理:如果流体的速度慢,压强就大;速度快,其压强就小。你可能做过这个实验:双手将两张小纸条分放在嘴巴两边,你朝中间吹气,小纸条反而相互靠近。
2 D0 B! Y6 w; \* `# \+ l 基于这一原则的机器人手爪并不鲜见。高压的空气流沿着爪的边缘喷出,形成一个“真空腔”,手爪就可以用来“抓取”距离很近的物件,而并不需要接触到物件。这样的机器人手爪通常用来拿起一些特殊的东西,它们或容易破碎,或需要无接触处理以避免感染。tvb now,tvbnow,bttvb2 u p: w2 ]6 _
这个类型的爪由于吸力不足,一般不能托起整个机器人。新西兰坎特伯雷大学的研究小组研制了比传统装置的吸力强5倍的超音速伯努利机器人手爪,足够支持小机器人自身的重量。 _' v5 n6 g; `( |
请看附图,机器人左右侧的轮子是触及到墙面的,但一前一后的两个圆爪则与墙面稍稍分开。机器人喷射空气流,强迫其通过一个微小的间隙,加速到超音速。结果就产生了可观的吸力。( a) Q$ k0 A0 l, h! O1 @! F. d
这种新型的机器人爪,大名叫非接触式附着垫(NCAP)。气流喷出的那小缝隙,宽度仅25微米,几何形状也是精心设计的,气流被强迫从这里喷出时达到3马赫的速度。是的,没有写错,也不开玩笑,就是音速的3倍。NCAP能做到这一点,既不依靠增加气流,也不需要增加压力,完全借助自身的几何特征使气流压缩,速度提升,获得足够的附着力。让它爬玻璃等光滑墙面,或倒悬在天花板上行进,都不在话下。公仔箱論壇, ^8 i2 E* S' ^; \7 Y
这种机器人可能用于工业检验。研究人员说他们正在努力,使超音速非接触式附着垫在“几个月”内,能以“几百美元”的价格买到。 |





 發表於 2011-6-18 11:26 AM
|
發表於 2011-6-18 11:26 AM
|